完全にインの定義について
エリアの黒線に対して以下の2パターンが想定されます。完全にインしているとは以下のどちらの状態ですか。
下図①も②も完全にINしている状態です。
①エリア内に物体が入っており、枠線に一切触れていない

②枠線の外側には物体が出ていないが、枠線と接触している
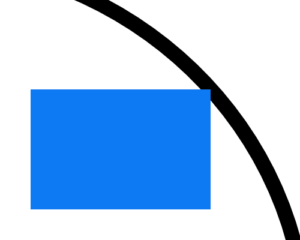
cf.Animal Allies Challenge guide ロボットゲームルールD07を参照ください。
回収した物体について
ベースに回収した物体を誤って、ベースの外に出してしまった場合は「①手で回収しても良い」か「②ロボットを使用してインさせる必要がある」のどちらでしょうか。
①でOKです。速やかに回収するようにお願い致します。
cf.Animal Allies Challenge guide ロボットゲームルールR10例外 3 を参照ください。
競技終了時のミッションキットの配置について
ベースに回収したミッションキットは競技終了時に「①ベース内に存在していなければ得点とならない」か「②ベースもしくは作業用テーブルに損際していれば得点となる」のどちらでしょうか。
②でOKです。
cf.Animal Allies Challenge guide ロボットゲームルールR12を参照ください。
審判による接触について
審判がミッションキットに接触することで、キットが壊れたもしくは配置が変わった場合は「①そのまま続行」「②該当のミッションは無条件加点」「③その他」のいずれの対応になりますか。
③審判は可能な限り現状を復帰するように努力をする。チームのRobotGameに影響がない場合はそのまま続行。審判により、明らかに得点条件を満たすことが困難になったと判断される場合は「善意の解釈」により該当ミッションの得点を与える。で良いと思います。
基本的に、そのようなことがないように審判は努力をします。もし起こってしまった場合は、.Animal Allies Challenge guide ロボットゲームルールGP3「善意の解釈」とR19「採点」の項目を参照ください。あくまでも、チームと審判の合意が得られるかどうかが重要になると考えられます。
M02-介助犬の行動について
ガードレールをロボットが完全に横切るとありますが、完全に横切るの定義は「①アタッチメントを含めたロボットとつながっている物体すべてが横切る必要がある」「②EV3などコントローラーがガードレール上部を通り過ぎる」「③その他」のいずれでしょうか。
③です。以下、日本大会での解釈です。RobotGameUpdateがでるまではこのルールで進行します。
M02 service dog
「completely crossed」および「traveling between the barriers」につきましては様々な解釈の仕方があるかと思います。
日本大会においては、次のように致します。
- 1. 完全に横切ったという瞬間:D04で定義されるロボット全体がフェンスのライン(下側の軸)の延長線以南まで移動した時をもって、完全に横切ったとして判断する。
- 2. バリアの間を通る:南側にある2つのバリアの間からロボットが侵入し、フェンスの東側にある2つのバリアの間からロボットが出てくること。
- 3. バリアの間およびフェンスを横切るロボットの部位:コントローラとともに移動するロボットの駆動元となっている部分(キャタピラ、タイヤなど)全体が、バリアの間を通りフェンス上を横切る必要がある。
仮に2つのモータで動くロボット2つに分離するようなロボットである場合、コントローラとともに移動する側がこの条件を満たすこと。
※文章に起こすと伝わりにくいですが、普通の車が交差点などを横切るイメージです。
「ロボット本体」がバリアの間を通ってフェンスを完全に横切る場合だけが認められるのか?
上記3の条件を満たすよう、お願いいたします。
バリアの間とありますが、バリアの上の外側にロボットがはみ出していた場合は認められるのか?
上記3の条件を満たしていれば、ロボットがはみ出しても構いません。
ロボット本体はフェンスより南側を西から東へ移動するが、「ロボットの一部」(そのロボットに取り付けられたアーム)が、バリアの間を通り、西から完全にフェンスを横切って倒すという場合は認められるのか?
上記3に抵触する状況と考えられるため、認められません。
M04-餌やりについて
冷蔵庫から餌を取り出すときに冷蔵庫のふたが開いたまま戻らなくなってしまった場合は「①ロボットでふたを戻す」「②手で戻してもよい」のどちらでしょうか。
①です。手で触れてはいけません。
M05-バイオミミクリーについて
バイオミミクリーの壁がロボットの全重量を支え、かつロボットの上に白いヤモリが存在している場合の得点は「①白いヤモリの全重量を支えている+ロボットの全重量を支えているの合計47pt」「②ロボットの全重量を支えているの32pt」のどちらでしょうか。
①でOKです。
:東日本大会、全国大会ではフィールドシートをデュアルロックでフィールドに固定しますか。
フィールドシートの固定に、デュアルロックは使用しません。
cf:フィールドセットアップガイドstep3フィールドマットの配置を参照ください。
「M04-餌やり」ではオブジェクト上に置いてターゲットエリアに置いても得点になるかどうか。また、オブジェクトは枠外に出ているが、餌を真上から見た場合はターゲットエリアに完全にインしている場合は得点になるかどうか。
どちらも得点になります。
「M05-バイオミミクリー」では白いヤモリやロボットがバイオミミクリーの壁で全重量を支えられているが、フィールドの壁に接触している場合は得点となるかどうか。
また何かしらの要因で反対側のフィールドに影響を与えてしまった場合はバイオミミクリーに挑戦している側、影響を与えられた側の得点の扱いはどうなるのでしょうか。
(例:反対側のコートのバイオミミクリーの影響で「M01-サメの輸送」のサメが壁に接触していなかったものが接触してしまった場合)
ロボットがフィールドの壁に接触している場合は、得点になりません。バイオミミクリーの壁が、フィールドの壁に接触している場合は、得点になります。
相手フィールドに影響を与えてしまった場合は、明らかに悪影響を与えていると判断された場合、該当ミッションの得点が与えられません。また、相手側の得点に関しても同様に、ロボットの動きによりミッションの状態が変わってしまった場合は、R16干渉により相手チームに得点が与えられます。
:「M07-パンダを野性に返す」では「スライド部が時計回りに完全に開いている」とありますが、完全に開いているはどの程度開いていれば完全に開いていると扱うのでしょうか。
だれの目から見ても完全に開いている状態を目指すようにお願いします。
:「M09-トレーニングと研究」の制約で「堆肥サンプルは一度に1つしか輸送できない」とありますが、一度の定義はどうなりますか。ベースから出発してベースに戻ってくるまでなのか、センサーで動作がオン・オフされることで1回となるのかどうか。
また、ベースから1つの堆肥サンプルを持って出発したロボットがフィールド上の堆肥サンプルを回収しつつ、2個以上同時にトレーニングと研究エリアに入れることは認められるかどうか。
同時に、複数の堆肥を移動させないようにしてください。
上記の理由から、後半の理由については認められません。
:「M09-トレーニングと研究」の輸送について複数の堆肥サンプルを搭載した状態でベースを出発し、フィールド上で作業をすることは認められるかどうか。また、搭載した堆肥サンプルをベースに戻る前に1つだけ置いてきた場合は得点として有効になるかどうか。
上述の通り、認められません。
:「M10-養蜂」のミッションモデルの蜂は触覚が立っている状態と寝ている状態のどちらが正しい状態になりますか。
ミッションの組立書に準拠します。蜂に関しては立っている状態です。
:輸送オブジェクトが審判に回収される条件はロボットの動作を中断したとき、ロボットと接触しているものでしょうか、ロボットが搭載しているものでしょうか。
また、ロボットはベースに完全にインしていない状態で中断した際に、ロボットが保持していた輸送オブジェクトは真上から見た場合にベースに完全にインしていても審判に回収されるのでしょうか。
審判に回収される対象となるものは、ロボットが輸送を行っているモデルになります。接触ならびに、搭載されているものは回収の対象です。
中断時に、ベースに完全にインしているモデルは、回収されず保持することができます。
上述の状況の場合、ペナルティはとられますが、モデルは保持することができます。
:M09学者やトレーナーモデルが下のパーツと外れてしまった場合、得点は認められるか。
認められません。
:M09堆肥の輸送の際、ロボットがベースから外に出る必要はあるか。
特に、ありません。
:M05バイオミミクリーについて。フィールドの境界はどこになるか。どこから先が相手フィールドになるのか。
2つのフィールドの壁の間が、2つのフィールドの境界になります。
:フィールドダメージ、得点の条件について
ロボットがデュアルロックを分離させたりミッションモデルを壊したりしてしまった場合、このダメージや行為によって得点となった、あるいは得点するのが容易になったミッションは無得点となる。
ミッションAと関係のない動作をしている際に(例えばミッションBへ挑戦している場合)、ミッションAにフィールドダメージを与えてしまった場合は、試合終了時に、得点条件を満たしていることが確認できる場合には、ミッションAの得点が与えられる。
:カエルのモデルについて、2匹のカエルがいるが、動物保護ミッションでカエルモデルがフィールドにそろった場合、2匹分の得点がもらえるのか。
カエルは2匹いますので、2ペア分の得点が入ります。
M09:トレーニングと研究について
競技終了時以下の条件は選択ではなく、複数認められる。
- 犬とトレーナーがトレーニングと研究エリアに完全にインしている︓12pt
- 動物学者がトレーニングと研究エリアに完全にインしている︓15pt
- 堆肥サンプル*がトレーニングと研究エリアに完全にインしている︓5pt/1つ
M13,14ミルクについて
競技終了時
以下の4つの状態が存在するが、④を満たしている場合、①②③も満たしているものとみなす。
具体的に、以下の5パターンが得点となる。
- ④を満たしている場合、10pt
- ③を満たしている場合、6pt
- ②を満たしている場合、3pt
- ①を満たしている場合、1pt
- いずれも満たしていない場合、0pt
M13
- ①3つ全てのミルクがベースに完全にインしている︓1pt
M14
- ②選択肢 1︓2pt
3つ全てのミルクが傾斜モデルによって完全に支えられている。
- ③選択肢 2︓3pt
3つ全てのミルクが傾斜モデルによって完全に支えられている。
ミルク以外に傾斜モデルによって支えられている物が存在しない。
ミルク以外に傾斜モデルに接触している物が存在しない。
- ④選択肢 3︓4pt
3つ全てのミルクが傾斜モデルによって完全に支えられている。
ミルク以外に傾斜モデルによって支えられている物が存在しない。
ミルク以外に傾斜モデルに接触している物が存在しない。